Pasar al contenido principal
IMBiO3R
Login
Menú principal
Home
Project
Presentation
Objetives
Team
Multimedia Gallery
Videos
Trajectory Control
Force control
External sensors
Others
Type II Singularities
Photographs
4 degrees of freedom parallel robot
Control architecture
Force sensor
Reconfigurable 4 dof parallel robot
Idiomas
English
Español
Presentation
Objetives
Team
Results
Multimedia
Publications
Supervised works
Degree final projects
Master thesis
PhD Thesis
Se encuentra usted aquí
Inicio
»
Multimedia Gallery
»
Photographs
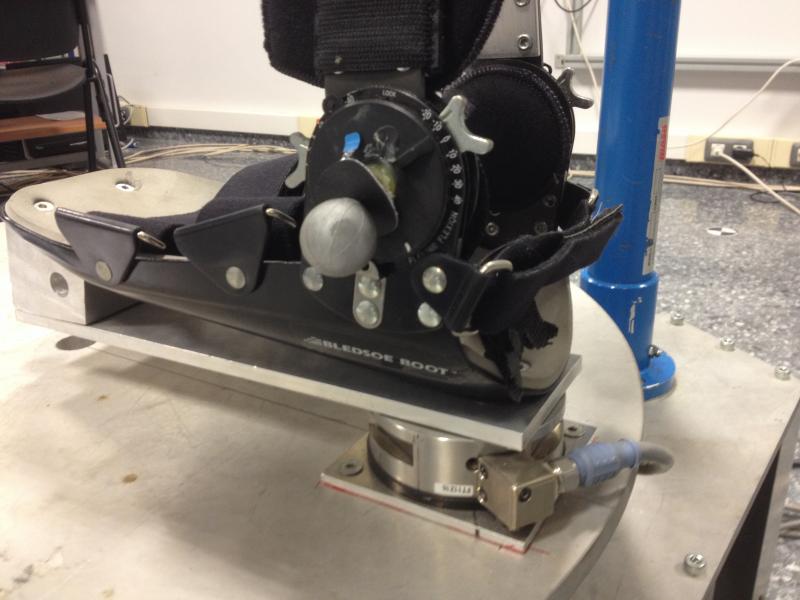
Force sensor
The parallel robot is equipped with an ATI DELTA of 6 degrees of freedom force sensor.
Theme by
Danetsoft
and
Danang Probo Sayekti
inspired by
Maksimer